足球鹰眼技术原理常被误解为简单摄像头追踪,实则依赖多系统协同的精密计算。这项技术通过高速摄像与算法分析,精准判定球是否整体越过门线,确保比赛公平。本文拆解其运作机制,澄清常见误区,揭示科技如何守护足球的纯粹性。
足球鹰眼技术原理常被误解为简单摄像头追踪,实则依赖多系统协同的精密计算。这项技术通过高速摄像与算法分析,精准判定球是否整体越过门线,确保比赛公平。本文拆解其运作机制,澄清常见误区,揭示科技如何守护足球的纯粹性。
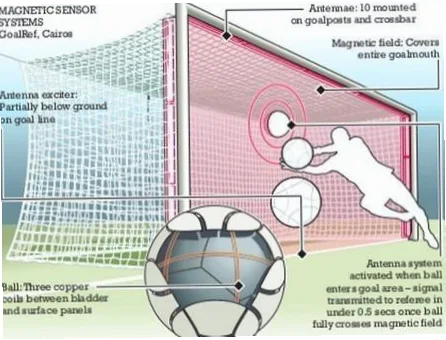
许多球迷以为鹰眼只是几台摄像机对准球门,实时回放画面。但实际系统由至少七台高速摄像机组成,每台每秒捕捉数千帧图像。这些设备分布在球场不同角度,同步记录足球和门线的相对位置。数据流瞬间传输至中央处理器,并非简单录像。
核心在于算法对三维空间的还原。摄像机捕捉的二维图像经三角测量技术,构建出球在球场坐标系中的精确位置。系统会滤除球员、阴影等干扰,只追踪足球本身。一旦球体完全越过门线平面,算法在零点几秒内触发信号,发送至裁判手表。
常见误区是认为鹰眼依赖视觉判断。实际上,它不依赖人眼可见的画面,而是基于数学计算。即便球速高达每小时120公里,系统也能通过预测轨迹锁定过线瞬间。这避免了因视角遮挡或裁判误判导致的争议。
技术还需同步校准,避免误差。每场比赛前,工程师会用特制工具测试门线传感器,确保摄像机与球场坐标匹配。环境光、草皮颜色变化都被纳入补偿模型。这种多系统协同,让鹰眼在高速对抗中保持99.9%以上的准确率。
从原理到落地,足球鹰眼技术原理体现了科技对公平的承诺。它不取代裁判,而是提供无法辩驳的证据。当球迷看到进球确认,背后是摄像机、算法与实时通信的精密协作,守护着比赛最纯粹的胜负瞬间。
很多人误以为足球比赛中的鹰眼技术只是普通的高清视频回放,实际上两者存在本质区别。普通视频回放依赖人眼判断,受角度、速度和主观因素影响,容易产生争议。而足球鹰眼技术原理基于多台高速摄像机与计算机视觉算法,能精确追踪足球的三维运动轨迹。
鹰眼系统通常部署7到10台摄像机,围绕球场关键区域架设,每秒钟可捕捉数百帧画面。这些摄像机从不同角度同步拍摄,将数据传输到中央处理器。算法通过三角测量和图像识别,实时计算足球的精确位置,误差控制在几毫米内。这远超人眼极限,能判断球是否整体越过门线。
普通视频回放需要人工慢放、缩放和讨论,而鹰眼在1秒内自动生成结果,并直接发送到裁判手表。系统不依赖裁判或视频助理裁判的主观解读,而是基于客观数据。例如,进球判定时,鹰眼会模拟球的飞行路径,即使被球员遮挡也能通过多视角重建轨迹。
误解的根源在于人们将“回放”与“分析”混淆。鹰眼不是简单播放录像,而是通过实时建模和概率计算,提供裁判无法肉眼捕捉的决策依据。普通视频只能展示画面,鹰眼则输出数学化的位置数据,这是两者核心差异。
理解这一原理,就能明白为何国际足联在2012年引入鹰眼后,门线争议大幅减少。技术并非替代裁判,而是补充人类视觉盲区。下次看比赛时,留意那些不起眼的摄像机——它们不是拍视频,而是在用算法守护比赛的公平。
许多人认为鹰眼技术等同于慢镜头回放,但这只是表象。现实是,鹰眼系统由10-12台高速摄像机组成,每台每秒捕捉500帧图像,远超普通摄像头。这些摄像机从不同角度覆盖球场,实时追踪足球运动轨迹。原理上,它依赖三角测量法,通过多视角数据合成三维坐标,而非单靠人眼判断。
足球鹰眼技术原理常常被误解为简单的慢动作回放,但实际上它是一套精密的高科技系统。该技术依赖10到12台高速摄像机,每台每秒捕捉500帧图像,远超普通摄像头的能力。这些摄像机从不同角度覆盖球场,实时追踪足球运动轨迹,通过三角测量法合成三维坐标,确保判罚精准。
这些高速摄像机分布在球场四周,每台都具备独立的数据处理能力。它们同步拍摄足球的每一个瞬间,捕捉细微的位移变化。由于足球速度极快,普通摄像头无法清晰记录,而鹰眼系统的帧率能有效避免模糊,为后续分析提供高质量图像。
三角测量法是鹰眼技术的核心原理。多台摄像机从不同位置拍摄同一物体,通过计算图像中的视差,系统能精确推导出足球在三维空间中的坐标。这一过程在毫秒内完成,完全依赖算法而非人眼判断,避免了主观误差。
数据合成后,系统会生成足球的运动轨迹模型,并实时显示在裁判屏幕上。例如,在判断是否进球时,系统会计算足球与门线的关系,误差控制在毫米级别。这种速度与精度是传统慢镜头回放无法比拟的,后者只能提供单一视角的延迟画面。
鹰眼技术还具备抗干扰能力,能应对球场光线变化和球员遮挡。每帧图像经过滤波处理,确保足球跟踪的稳定性。相比人眼依赖经验判断,鹰眼系统用数据说话,为比赛提供了可靠的技术保障。
许多球迷误以为足球场上的“鹰眼”系统能像网球或排球那样,自动识别所有越位情况。这个误解源于对“鹰眼”技术原理的泛化理解。实际上,足球赛事的越位判罚依赖的是“半自动越位识别技术”(SAOT),它与传统鹰眼在摄像头布局、追踪方式和判定逻辑上有本质区别。
足球鹰眼技术原理的核心在于多台高速摄像机的协同工作。SAOT系统通常在场馆顶棚安装12至14个专用摄像头,这些摄像头以每秒50帧的速度捕捉球员身上29个数据点。系统通过三角定位法实时计算球员的三维位置,但它的主要功能是生成“越位线”的辅助数据,而非直接给出最终判决。
关键区别在于,SAOT系统无法像鹰眼在网球中那样“看到”球是否出界或触网。在越位判罚中,系统只负责追踪球员的躯干位置,而传球触球瞬间的判定仍需裁判通过视频助理裁判(VAR)手动确认。因此,当传球球员的脚触球时,系统自动生成越位线,但若裁判认为传球时机存在争议,会调取多角度视频复核。
此外,足球比赛中的身体接触、球员主动干扰比赛等主观因素,超出了机器视觉的判定范围。例如,一名球员虽然处于越位位置,但若裁判认为他未参与进攻,系统不会自动触发判罚。这种“主观越位”的界定完全依赖裁判经验,鹰眼技术在此环节仅提供客观数据支持。
总结来说,足球越位判罚是“人机协作”的结果。SAOT系统大幅提升了越位判罚的速度和精确度,但无法替代裁判对比赛情境的综合判断。理解足球鹰眼技术原理,有助于球迷理性看待VAR时代的判罚争议。

另一个误区是鹰眼适用于越位判罚,但技术原理专为门线设计。事实上,鹰眼仅在球完全过线时发送信号给裁判手表,误差小于5毫米。越位判定需更复杂的人体骨骼追踪,而鹰眼不识别球员位置。其核心算法聚焦球的边缘,排除其他干扰因素,确保门线
足球鹰眼技术原理常被误解为能用于越位判罚,但这一认知偏离了其核心设计。鹰眼系统最初专为门线技术打造,通过高速摄像头追踪球的运行轨迹,仅在球体完全越过门线时向裁判手表发送信号。其误差被控制在5毫米以内,确保进球判罚的绝对精准。
在技术实现上,鹰眼的算法聚焦于球的边缘识别,利用多角度摄像头捕捉球的飞行路径,并排除球员、草坪等干扰因素。系统不涉及球员位置或身体动作分析,因此无法处理越位判定所需的复杂人体骨骼追踪。越位判罚需要实时监测球员与球的位置关系,并计算身体相对于对手的距离,这超出了鹰眼的设计范畴。